TITLI

play now
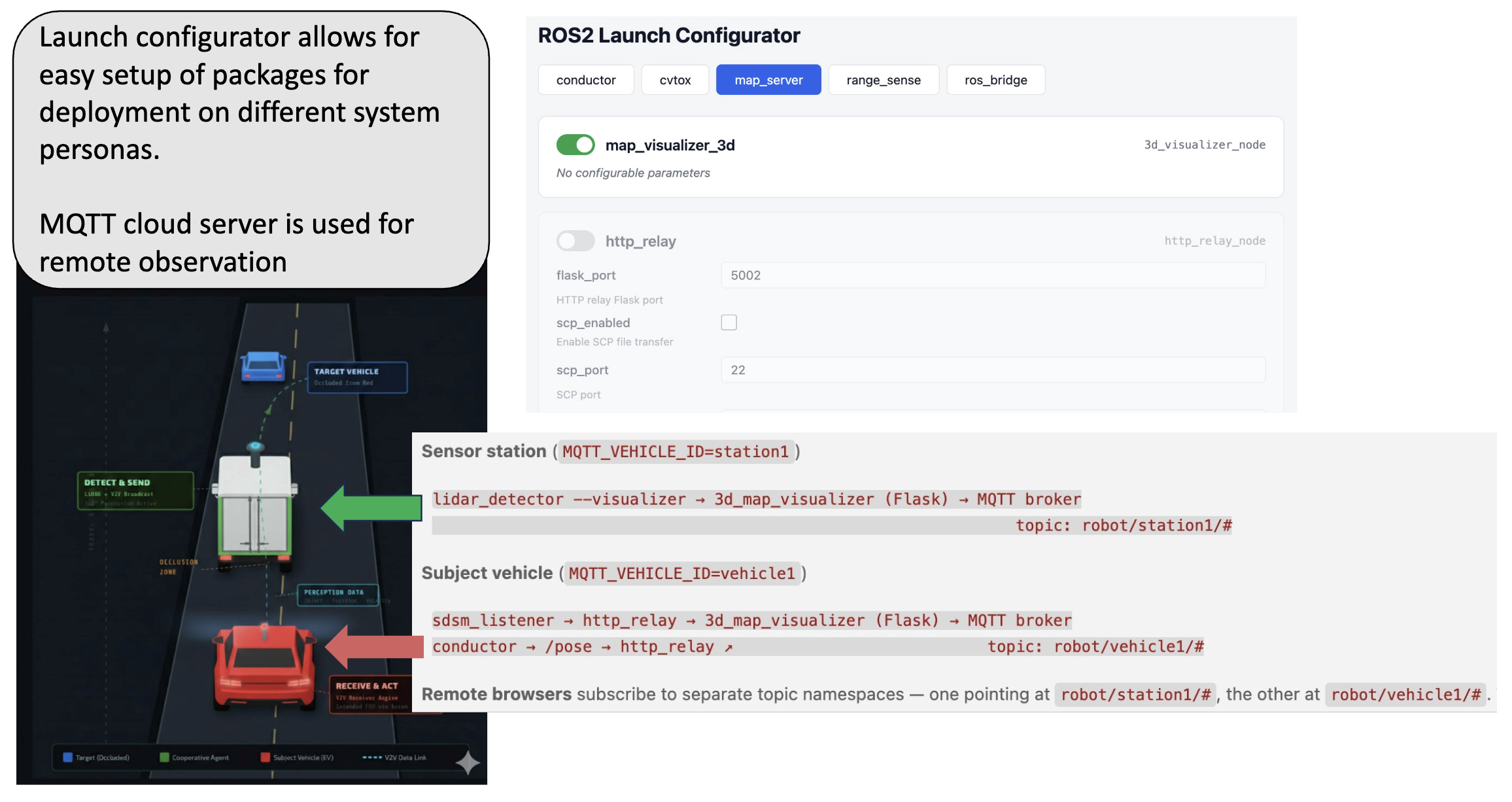
# Configure
$ python launch_configurator/app.y
# Launch
$ ros2 launch launch_all.py packages:='map_server range_sense cvtox'
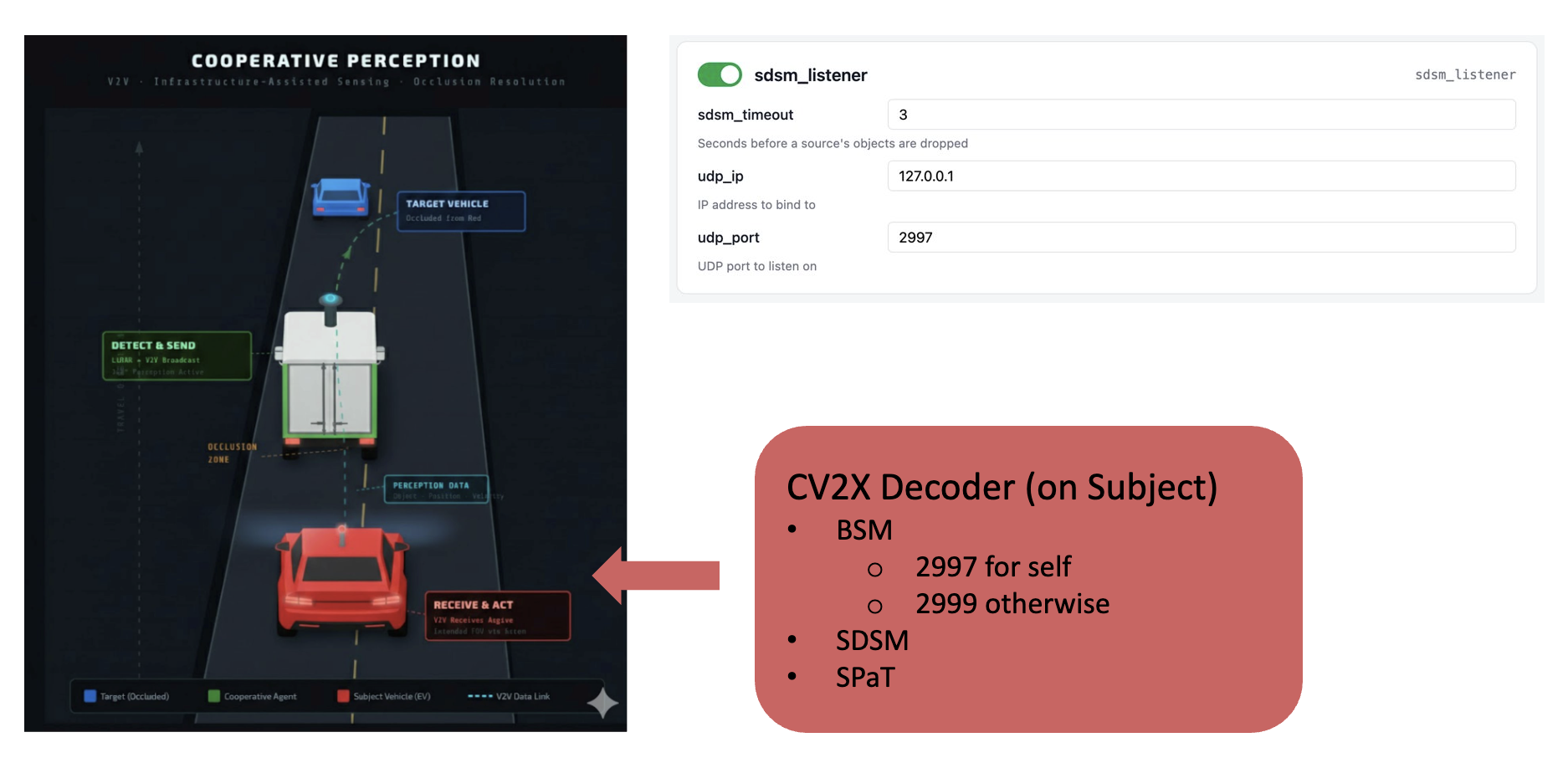
# Receive BSM messages
$ ros2 run cvtox bsm_listener
# Receive SPaT messages
$ ros2 run cvtox spat_listener
# Receive SDSM messages (raw mode from lidar_detector.py --sdsm-raw)
$ ros2 run cvtox sdsm_listener --ros-args -p udp_port:=5000
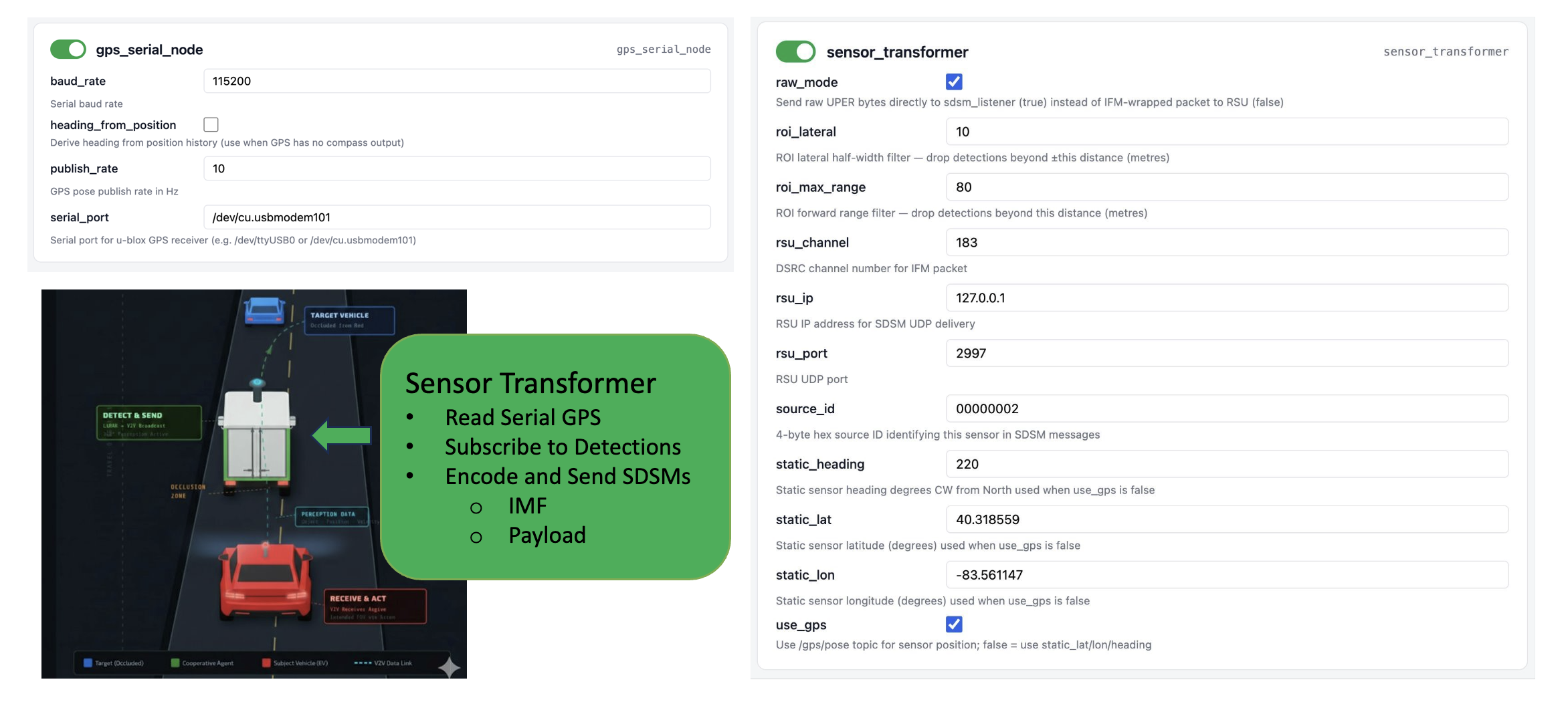
# Check USB
$ ls /dev/tty* /dev/cu.*
# Run GPS
$ ros2 run cvtox gps_serial_node --ros-args \
–p serial_port:=/dev/cu.usbmodem101
# Run All Via Launch Configurator
$ ros2 launch launch_all.py packages:='cvtox'
# Simulate GPS and Detections
$ python3 src/cvtox/scripts/sim_sensor_input.py \
--lat 37.3382 --lon -121.8863 --heading 90.0
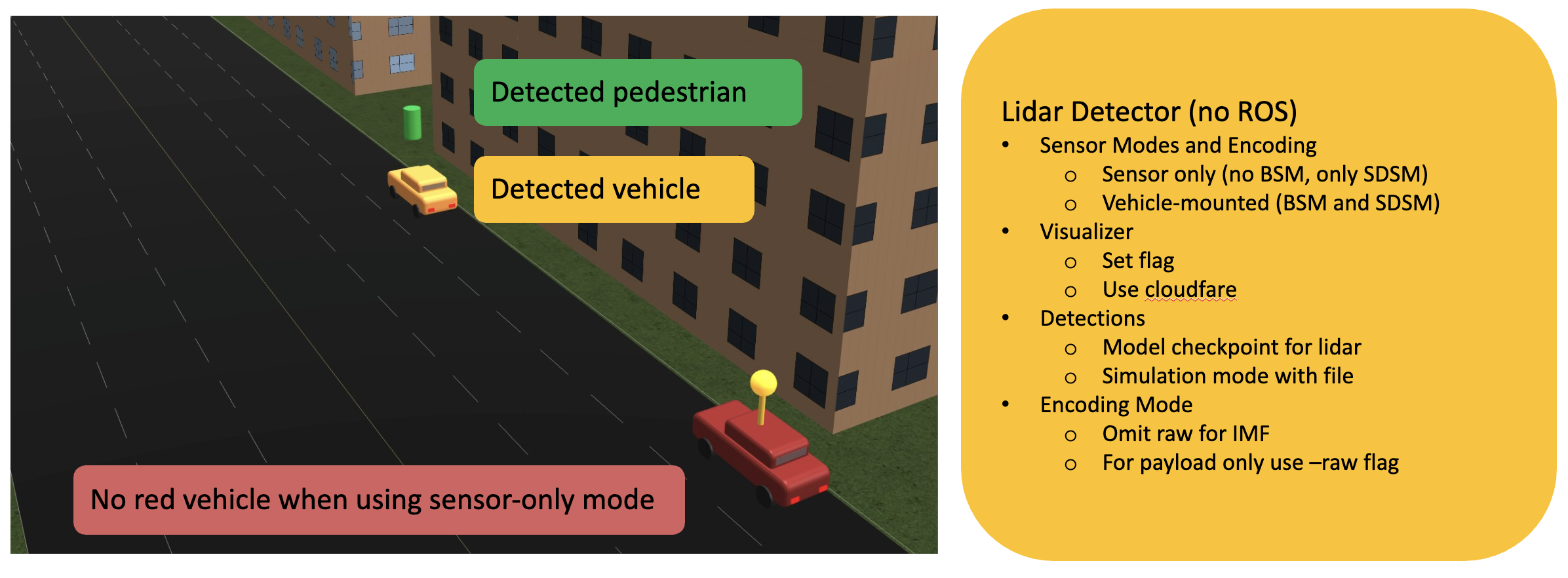
# Package
$ cd src/range_sense
# Simulated Lidar Detector Launch
$ range_sense % python scripts/lidar_detector.py \
--detections-file scripts/simulated_detections.json \
--sdsm --sdsm-raw --sdsm-source-id=00000010 --rsu-ip 127.0.0.1 --rsu-port 5000 \
--visualizer \
--sv-lat=40.318880 --sv-lon=-83.560636 --sv-heading=237
# Actual Lidar Detector Launch
$ range_sense % python scripts/lidar_detector.py \
--ckpt=models/epoch_160.pth